Forced Motion
Discussion
Electric circuits are analyzed using exactly the same equations as spring--mass systems. We look at the current $I$ flowing through the circuit, where $\displaystyle I=\frac{dQ}{dt}$ where $Q$ is charge. $Q$ is measured in coulombs while $I$ is measured in amperes, which are coulombs/second. The "electromotive force" $E$ powering the circuit is measured in volts (note that pressure may be a better metaphor). An LRC circuit with an AC power source includes the
following components. As current flows through the loops of a coil,
the spinning current induces a magnetic field. If the current flow
changes, then the magnetic field changes. A changing magnetic field inside
the loops will then induce a current. This acts like mass in a spring-mass
system, since the induced current opposes the change in the current, just
as mass measures opposition to change in momentum. A coil has "inductance"
$L$, which is measured in henrys. Voltage drop across a coil is given by
$\displaystyle V=L\frac{dI}{dt}=L\frac{d^2Q}{dt^2}$.
A resistor does what it sounds like, it resists the flow of
current. Resistance $R$, measured in ohms, plays the role of friction. The
voltage drop across a resistor is $\displaystyle V=RI=R\frac{dQ}{dt}$.
A capacitor stores charge on parallel plates separated by a
dielectric.
The amount of charge is proportional to the impressed voltage, $Q=CV$, or
$\displaystyle V=\frac{1}{C}Q$. Capacitance $C$ is measured in farads,
which are coulombs per volt. Since the
charge will be released as the voltage drops, the capacitor plays the role
of the spring, storing energy and then releasing it later. In fact, $1/C$
is called the "elastance" of the circuit and plays the role of the spring
constant (and has units of "daraf", though reciprocal farad is
the more boring preferred term).
Finally, the AC power source produces an alternating voltage described by
a sinusoidal function, $E(t)=V_0\cos(\omega t)$. $V_0$ is the peak
amplitude and $\omega$ is the circular frequency. Note that when voltages
are given, you typically use the root-mean-square amplitude rather than
the peak amplitude, so a 120 volt supply would correspond to a peak
amplitude of $120\sqrt2\approx 170$ volts. Similarly, frequency is
usually given in Hertz, which are cycles per second, while circular
frequency is measured in radians per second, so a 60 Hertz supply has
$\omega=60\times2\pi=120pi$ since 2π radians equals one full cycle.
We now consider either an LRC circuit or a spring-mass system subject to
an external force. These are mathematically identical if you just match
things up as discussed above. And just as an AC power source supplies
voltage in the form $E(t)=V_0\cos(\omega t)$, the most interesting forces
are periodic forces, which we will assume take the form $F(t)=F_0
\cos(\omega t)$ where $F$ is force, $t$ is time, $F_0$ is amplitude and
$\omega$ is the circular frequency. If you are looking at how vibrations
from a motor running or any other periodic phenomenon affects a structure,
you will be led to these sorts of forces. In what follows, we will use the
labels for a spring-mass system, since that is more familiar to most
students. Just remember everything works the same for circuits.
We start with the undamped case $(c=0)$.
We have solved the homogeneous
problem in the previous section, obtaining $A\cos(\omega_0(t + \phi))$
where $\omega_0 =\sqrt{k/m}$
is called the natural
frequency of the spring-mass system. We will now consider the particular
solution of
$$m\frac{d^2x}{dt^2}+kx=F_0\cos(\omega t)$$
Since $F_0 \cos(\omega t) = \Re[F_0 e^{i\omega t}]$, we will try to find the
particular solution for
the complex problem and then take the real part. So we guess
$$ \begin{align}
z&=ae^{i\omega t} \\
z'&=i\omega ae^{i\omega t} \\
z''&=-\omega^2ae^{i\omega t}
\end{align} $$
So we get
$$ \begin{align}
-m\omega^2ae^{i\omega t}+kae^{i\omega t}&=F_0e^{i\omega t} \\
a&=\frac{F_0}{-m\omega^2+k}=\frac{F_0}{m(\omega_0^2-\omega^2)}
\end{align} $$
and taking the real part of $ae^{i\omega t}$ yields a particular solution
of
$$ x(t)=\frac{F_0}{m(\omega_0^2-\omega^2)}\cos(\omega t)$$
Note that the particular solution has the same frequency as the forcing
function but that the amplitude is divided by a factor $m(\omega_0^2 -
\omega^2)$.
We would expect to see that mass would be inversely proportional to the
displacement generated by a fixed force, but it may be something of a surprise
that the frequency plays such a large role. The underlying physical intuition
is that the spring wants to oscillate at its natural frequency, and the closer
the forcing function is to the natural frequency, the more the forcing
function and the spring will work together and not in opposition, hence the
larger amplitude of the response. The general solution is then
$$x(t)=\frac{F_0}{m(\omega_0^2-\omega^2)}\cos(\omega
t)+A\cos(\omega_0(t+\phi))$$
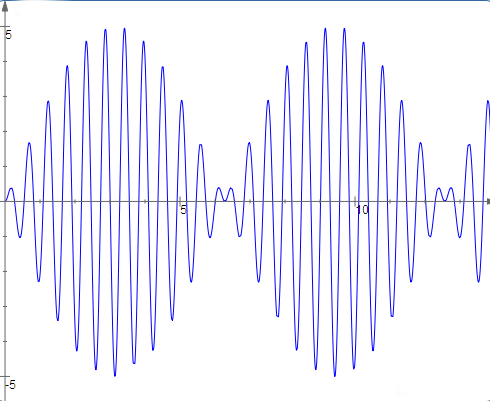
If we plot out the solution curves, we will see the phenomenon of beats
arising.
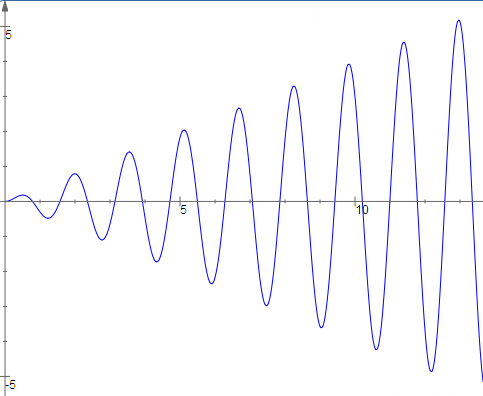
This is most easily seen if $\omega$ and $\omega_0$ are close. Then
the amplitude
of the solution will steadily increase as the forcing function pours ever
greater amounts of energy into the system. However, if the forcing function
is not exactly in sync with the natural frequency of the system (that is
$\omega\ne\omega_0$) then eventually the forcing function
will become out
of phase with the natural frequency. Then the force applied to the system will
reduce the amplitude and the ``beat'' will die off. At the end of the beat, the
forcing function will have worked its way back in sync with the natural
frequency and the pattern will start all over again.
An LRC circuit with an AC power source includes the
following components. As current flows through the loops of a coil,
the spinning current induces a magnetic field. If the current flow
changes, then the magnetic field changes. A changing magnetic field inside
the loops will then induce a current. This acts like mass in a spring-mass
system, since the induced current opposes the change in the current, just
as mass measures opposition to change in momentum. A coil has "inductance"
$L$, which is measured in henrys. Voltage drop across a coil is given by
$\displaystyle V=L\frac{dI}{dt}=L\frac{d^2Q}{dt^2}$.
A resistor does what it sounds like, it resists the flow of
current. Resistance $R$, measured in ohms, plays the role of friction. The
voltage drop across a resistor is $\displaystyle V=RI=R\frac{dQ}{dt}$.
A capacitor stores charge on parallel plates separated by a
dielectric.
The amount of charge is proportional to the impressed voltage, $Q=CV$, or
$\displaystyle V=\frac{1}{C}Q$. Capacitance $C$ is measured in farads,
which are coulombs per volt. Since the
charge will be released as the voltage drops, the capacitor plays the role
of the spring, storing energy and then releasing it later. In fact, $1/C$
is called the "elastance" of the circuit and plays the role of the spring
constant (and has units of "daraf", though reciprocal farad is
the more boring preferred term).
Finally, the AC power source produces an alternating voltage described by
a sinusoidal function, $E(t)=V_0\cos(\omega t)$. $V_0$ is the peak
amplitude and $\omega$ is the circular frequency. Note that when voltages
are given, you typically use the root-mean-square amplitude rather than
the peak amplitude, so a 120 volt supply would correspond to a peak
amplitude of $120\sqrt2\approx 170$ volts. Similarly, frequency is
usually given in Hertz, which are cycles per second, while circular
frequency is measured in radians per second, so a 60 Hertz supply has
$\omega=60\times2\pi=120pi$ since 2π radians equals one full cycle.
We now consider either an LRC circuit or a spring-mass system subject to
an external force. These are mathematically identical if you just match
things up as discussed above. And just as an AC power source supplies
voltage in the form $E(t)=V_0\cos(\omega t)$, the most interesting forces
are periodic forces, which we will assume take the form $F(t)=F_0
\cos(\omega t)$ where $F$ is force, $t$ is time, $F_0$ is amplitude and
$\omega$ is the circular frequency. If you are looking at how vibrations
from a motor running or any other periodic phenomenon affects a structure,
you will be led to these sorts of forces. In what follows, we will use the
labels for a spring-mass system, since that is more familiar to most
students. Just remember everything works the same for circuits.
We start with the undamped case $(c=0)$.
We have solved the homogeneous
problem in the previous section, obtaining $A\cos(\omega_0(t + \phi))$
where $\omega_0 =\sqrt{k/m}$
is called the natural
frequency of the spring-mass system. We will now consider the particular
solution of
$$m\frac{d^2x}{dt^2}+kx=F_0\cos(\omega t)$$
Since $F_0 \cos(\omega t) = \Re[F_0 e^{i\omega t}]$, we will try to find the
particular solution for
the complex problem and then take the real part. So we guess
$$ \begin{align}
z&=ae^{i\omega t} \\
z'&=i\omega ae^{i\omega t} \\
z''&=-\omega^2ae^{i\omega t}
\end{align} $$
So we get
$$ \begin{align}
-m\omega^2ae^{i\omega t}+kae^{i\omega t}&=F_0e^{i\omega t} \\
a&=\frac{F_0}{-m\omega^2+k}=\frac{F_0}{m(\omega_0^2-\omega^2)}
\end{align} $$
and taking the real part of $ae^{i\omega t}$ yields a particular solution
of
$$ x(t)=\frac{F_0}{m(\omega_0^2-\omega^2)}\cos(\omega t)$$
Note that the particular solution has the same frequency as the forcing
function but that the amplitude is divided by a factor $m(\omega_0^2 -
\omega^2)$.
We would expect to see that mass would be inversely proportional to the
displacement generated by a fixed force, but it may be something of a surprise
that the frequency plays such a large role. The underlying physical intuition
is that the spring wants to oscillate at its natural frequency, and the closer
the forcing function is to the natural frequency, the more the forcing
function and the spring will work together and not in opposition, hence the
larger amplitude of the response. The general solution is then
$$x(t)=\frac{F_0}{m(\omega_0^2-\omega^2)}\cos(\omega
t)+A\cos(\omega_0(t+\phi))$$
If we plot out the solution curves, we will see the phenomenon of beats
arising.
This is most easily seen if $\omega$ and $\omega_0$ are close. Then
the amplitude
of the solution will steadily increase as the forcing function pours ever
greater amounts of energy into the system. However, if the forcing function
is not exactly in sync with the natural frequency of the system (that is
$\omega\ne\omega_0$) then eventually the forcing function
will become out
of phase with the natural frequency. Then the force applied to the system will
reduce the amplitude and the ``beat'' will die off. At the end of the beat, the
forcing function will have worked its way back in sync with the natural
frequency and the pattern will start all over again.
If you have any problems with this page, please contact bennett@ksu.edu.
©1994-2025 Andrew G. Bennett